
Nearest Neighbor Classification
给定一个查询样本 $q$,找到 k 个离 $q$ 最近的样本点。对于回归任务,返回这 k 个点的均值;对于分类任务,返回数量最多的类别或者分布表
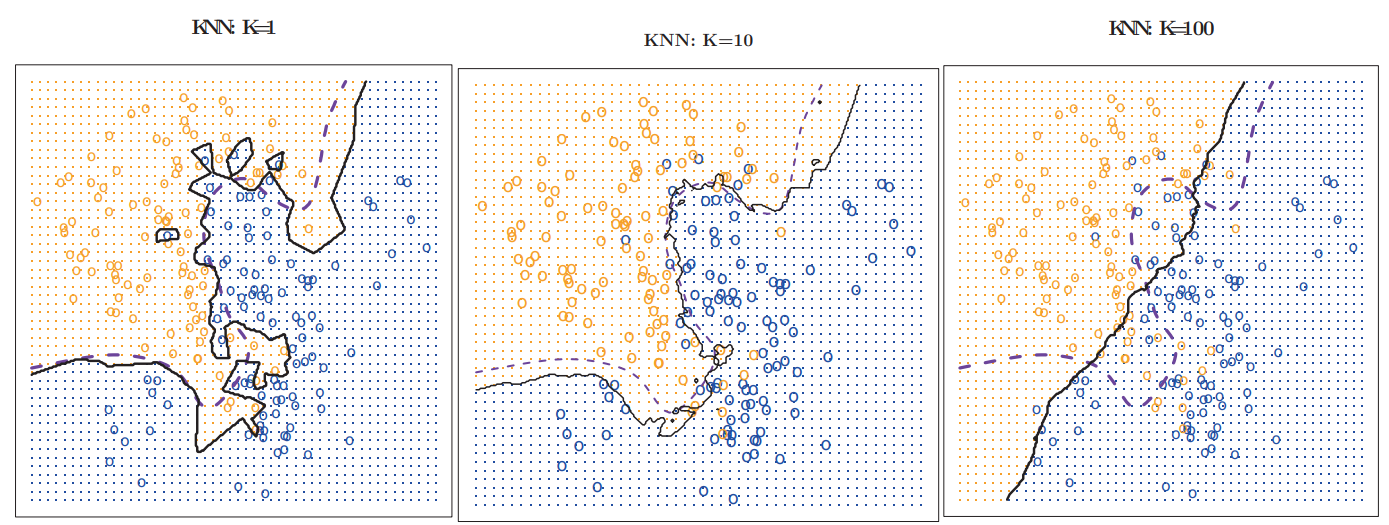
随着超参数 k 的数值增大,kNN 一般会由过拟合变为欠拟合
Exhaustive k-NN 算法
给定一个样本点 $q$,计算所有的 n 个训练样本点到 $q$ 的距离,维护一个距离的小顶堆得到最小的 k 个距离
k-NN 的训练复杂度为 0, 运行复杂度为 $O(nd + n\log k)$
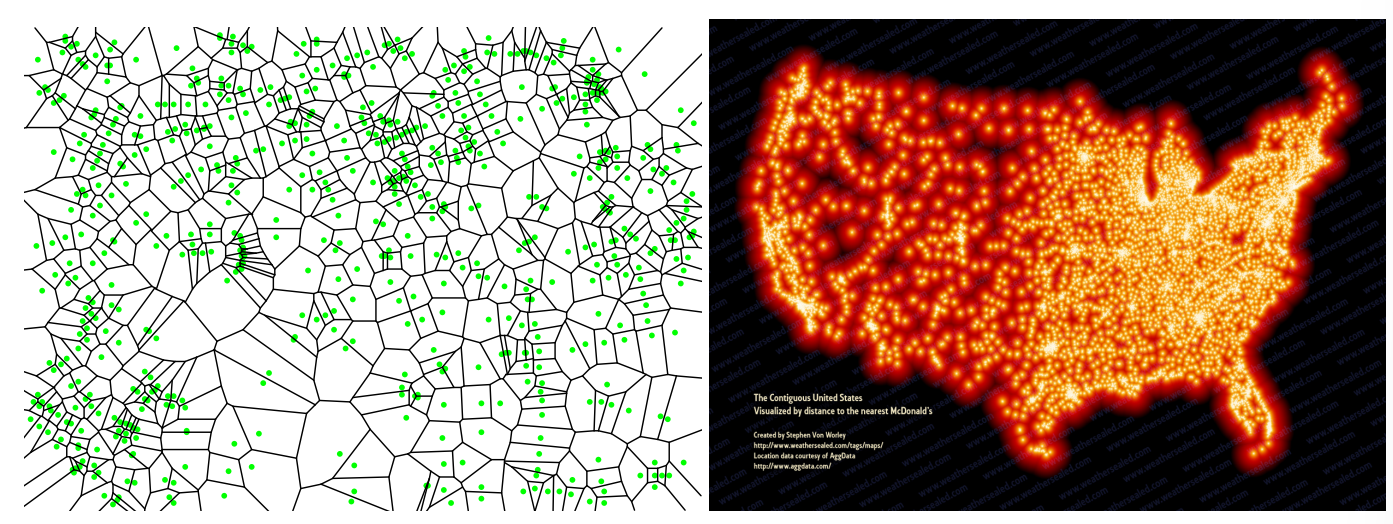
Voronoi Diagrams
设 $X$ 是一个点集,对于 $w \in X$,它的 Voronoi cell 定义为
$$Vor(w) = \{ p \in \mathbb{R}^d : \|p - w\| \le \|p - v\|, \forall v \in X \}$$$X$ 中 所有的 Voronoi cell 就是 Voronoi diagram
Voronoi diagram 的空间复杂度为 $O(n^{[d / 2]}$(用边来衡量),当维度 d 增加是空间复杂度会稍微低于这个公式,但是仍然是指数级增长,所以不适合于高维数据。但是在实际应用中复杂度一般都是 $O(n)$
在运行时,给定一个点 $q$,找出一个点 $w$ 使得 $q \in Var(w)$,那么我们就可以使用 $w$ 的属性来预测 $q$
对于二维数据,在训练时需要 $O(n\log n)$ 的复杂度计算 Voronoi diagram,并使用一个梯形图(trapezoidal map)存储数据;运行时查找 Voronoi cell 的复杂度为 $O(\log n)$。对于高维数据需要使用 binary space partition tree 来存储,并且复杂度难以衡量
Voronoi 只是用了一个邻近点来估计 $q$,所以是一种 1-NN 算法,虽然可以推广到 k 阶,但是计算复杂度较大且难以实现
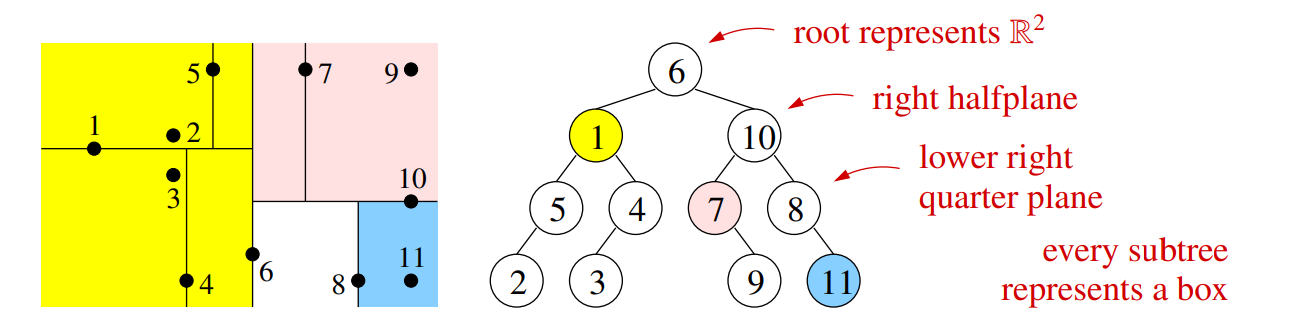
k-d Trees
k-d Tree 使用类似决策树的方式来进行 NN 搜索,但是使用和决策树不同的准则来选择最优划分
- 选择宽度最大的特征 $w$ 用于划分,即特征 i that $\max_{i, j,k}(X_{ji} - X_{ki})$,因为我们不希望一个样本点发散出去的邻接区跨越多个 box 区域,所以在宽度较大的特征上进行切分可以让 box 接近正方形
- 选择特征的中位数或者中值作为划分边界。使用中位数可以保证树的深度为 $\log_2 n$,建树复杂度为 $O(nd \log n)$;如果使用中值可能导致树失衡
- 每个中间节点都会存储一个训练数据点,所以每次搜索的时候不用下降到叶节点
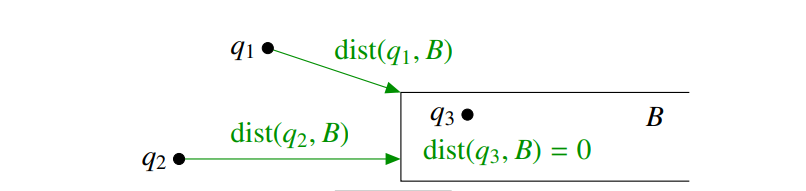
在运行时,给定一个点 $q$,寻找一个训练样本点 $w$ 满足 $\|q - w \| \le (1 + \epsilon) \|q - u\|$,其中 $u$ 是训练样本中距离 $q$ 最近的距离,也就是我们找到的样本点 $w$ 不能远于最小距离的 $1+\epsilon$ 倍
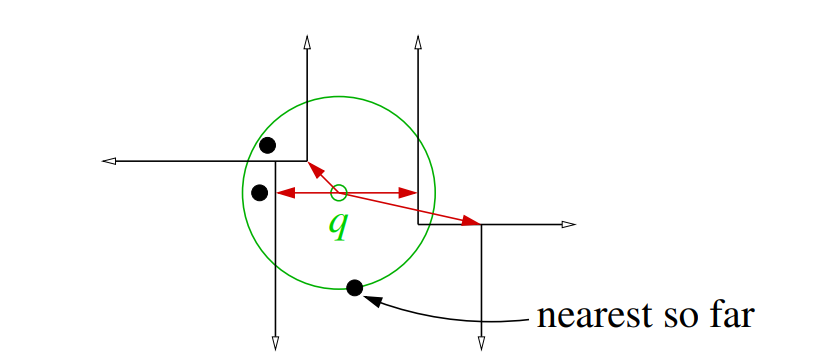
在搜索时,我们需要计算 $q$ 到区域 B 的最小距离 $dist(q, B) = \min_{z \in B} \|q - z\|$
搜索过程中需要维护一个小顶堆,用来保存在还没有搜索的 box 的距离。每次搜索的时候优先搜索离 $q$ 最近的 box。如果当前搜索的 box 离 $q$ 的距离的 $1 + \epsilon$ 倍小于下一个最近 box 则继续,反之停止搜索
1-NN 算法:
- 将根节点的距离设置为 0,推入小顶堆 $Q$
- 将当前距离 $r$ 设置为 $\infty$
- 如果 $Q$ 不为空,并且 $(1 + \epsilon) \cdot \text{minkey}(Q) > r$
- 将 $Q$ 中节点弹出,它对应的 box 是 $B$
- 取出 $B$ 中的训练样本 v,如果 $\|q - v\| < r$,那么 $w \leftarrow v; r \leftarrow \|q - v\|$
- 继续查看子节点对应的区域 $B'$ 和 $B''$
- 如果 $(1 + \epsilon) \cdot dist(q, B') < r$,将 $B'$ 和距离插入 $Q$
- 如果 $(1 + \epsilon) \cdot dist(q, B'') < r$,将 $B''$ 和距离插入 $Q$
- 返回 $w$